







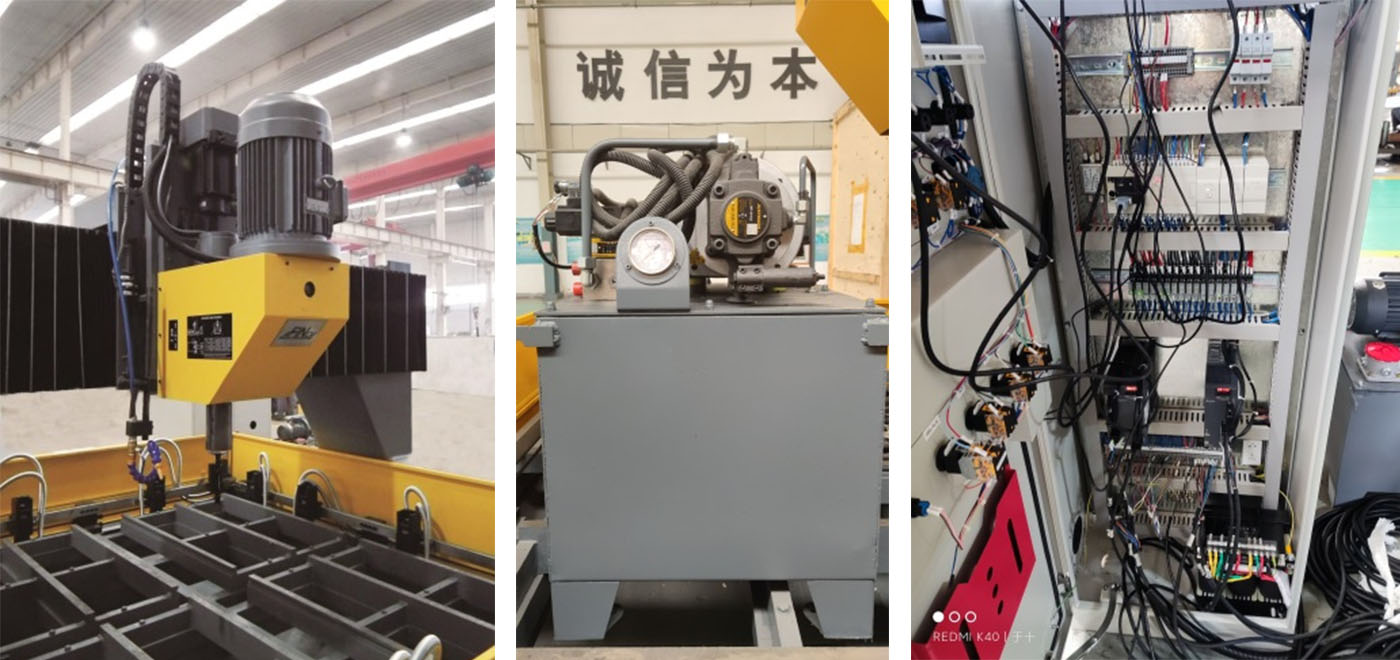
Máquina de perfuração CNC móvel tipo pórtico PLD3030A e PLD4030




| Inome do tem | Parâmetro | ||
| PLD3030A | PLD4030 | ||
| Usinagem máximaplacatamanho | Comprimento x Largura | 3000x3000 mm | 4000*3000mm |
| Grossura | 200 mm | 100 mm | |
| Trabalharmesa | dimensão da largura da ranhura em T | 22 mm | |
| Cabeçote de perfuração | Qquantidade | 2 | 1 |
| Perfuração máximaburacodiâmetro | Φ12mm-Φ50mm | ||
| RPM(conversão de frequência) | 120-450 rpm | ||
| Cone Morse do fuso | Nº 4 | ||
| Potência do motor do fuso | 2x7,5 kW | 5,5 kW | |
| Distância da face inferior defusopara a mesa de trabalho | 200-550mm | ||
| Movimento longitudinal do pórtico (X-eixo) | Deslocamento no eixo X | 3000 mm | |
| velocidade de deslocamento no eixo X | 0-8 m/min | ||
| Potência do servomotor do eixo X | 2x2,0 kW | ||
| Precisão de posicionamento no eixo X | 0,1 mm/inteiro | ||
| Movimento lateral da cabeça de força (Eixo Y) | Distância máxima entre duas unidades de potência do eixo Y | 3000 mm | |
| Distância mínima entre duas cabeças de força do eixo Y | 470 mm | ||
| Potência do servomotor do eixo Y | 1,5 kW | ||
| Movimento de alimentação da cabeça de força | Deslocamento no eixo Z | 350 mm | |
| Potência do servomotor do eixo Z | 2*2KW | ||
| transportador de cavacos e sistema de resfriamento | Potência do motor do transportador de cavacos | 0,75 kW | |
| Potência do motor da bomba de refrigeração | 0,45 kW | ||
| Esistema elétrico | Potência total do motor | Aproximadamente 30 kW | Sobre20 kW |
| Dimensões gerais da máquina-ferramenta | Aproximadamente 6970x6035x2990 mm | ||
1. O diâmetro máximo de perfuração da máquina-ferramenta é de 50 mm, a espessura máxima da chapa a ser perfurada é de 200 mm e a dimensão máxima da chapa é de 3000 x 3000 mm.
2. A máquina-ferramenta está equipada com duas cabeças de perfuração com alimentação servo independente.
3. A posição das coordenadas do furo pode ser rapidamente determinada a uma velocidade de 8 m/min, e o tempo auxiliar é relativamente curto.
4. O motor do fuso da cabeça de perfuração adota regulação de velocidade por conversão de frequência contínua, e a velocidade de avanço adota regulação de velocidade contínua servo, o que facilita a operação.
5. Após a configuração do curso de avanço da perfuração, o equipamento possui função de controle automático.
6. O furo cônico do eixo é Morse nº 4 e está equipado com uma bucha redutora Morse nº 4/3, que permite a instalação de brocas de diferentes diâmetros.
7. Adota-se a estrutura móvel tipo pórtico, a máquina ocupa uma área pequena e o layout estrutural é racional.

8. O movimento do eixo X do pórtico adota um sistema de guia linear de rolamentos com alta capacidade de carga, o que proporciona flexibilidade.
9. A máquina está equipada com um dispositivo de ajuste da ferramenta com mola central, que permite identificar facilmente a posição da placa.
10. O sistema de controle adota o software de programação de computador superior desenvolvido independentemente por nossa empresa e combinado com o controlador lógico programável (CLP), apresentando um alto grau de automação.
11. O trilho guia da máquina e a porca do fuso de esferas estão equipados com dispositivo de lubrificação automática.
12. O trilho guia do eixo X adota uma cobertura protetora telescópica de aço inoxidável, ambos os lados do trilho guia do eixo Y adotam coberturas protetoras flexíveis e um defletor à prova d'água foi adicionado ao redor da bancada de trabalho.
| NÃO. | Nome | Marca | País |
| 1 | Ltrilho guia interno | HIWIN/PMI | Taiwan, China |
| 2 | Servoacionador | Mitsubishi | Japão |
| 3 | Smotor servo | Mitsubishi | Japão |
| 4 | Controlador programável | Mitsubishi | Japão |
| 5 | Dispositivo de lubrificação automática | BIJUR/HERG | EUA / Japão |
| 6 | Ccomputador | Lenovo | China |
Nota: O fornecedor acima é o nosso fornecedor padrão. Ele poderá ser substituído por componentes de mesma qualidade de outra marca caso o fornecedor acima não consiga fornecer os componentes em alguma situação específica.



Perfil resumido da empresa  Informações da fábrica
Informações da fábrica  Capacidade de produção anual
Capacidade de produção anual  Habilidade de Negociação
Habilidade de Negociação 
Categorias de produtos
-

Máquina de perfuração CNC de alta velocidade PHD3016 e PHD4030...
-

Documento técnico do PDDL2016 Tipo Inteligente...
-

Furadeira CNC de alta velocidade PHD1616S para St...
-

Furadeira CNC PHD2020C para chapas de aço
-

PD16C Furadeira de chapas CNC móvel de pórtico com mesa dupla...
-

Máquina de perfuração de chapas CNC móvel tipo pórtico PLD3016